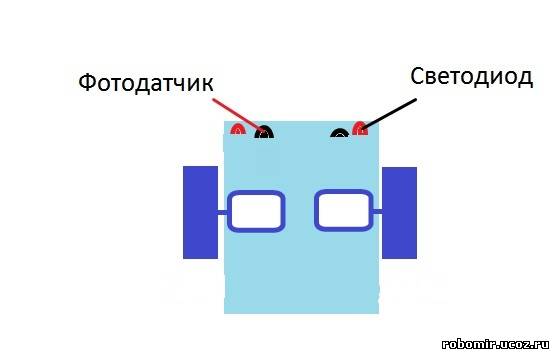
Данный робот сделан на драйвере двигателя L293D он выполняет роль усилителя сигнала с фотодатчика. Вот схема: Не знаю как у вас, но у меня эта схема не вызвала никаких затруднений. Если робот не будет работать, то следует эмитор фототранзистора вывести на плюс, но при этом следует поставить сопротивление на 220 ом на вход, ато можно спалить микросхему. Также можно заставить робота "бегать" за ладонью, для этого нам понадобится поставить лампочку или светодиод, как показано на рисунке: Свет отразится от ладони и робот как собачка поедет за ней.
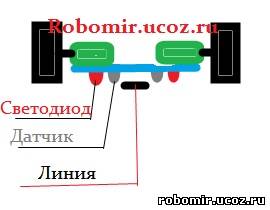
Также можно, немного изменив расположение датчиков, заставить робота ездить по нарисованной на белом листе чёрной линии. Для этого стоит расположить датчики, как на рисунке: Ширина линии зависит от расположения датчиков на роботе, чтобы вычислить ширину линии надо из расстояния между фотодатчиками вычесть 3-4 мм. Для робота, следующего по линии следует использовать низко скоростные моторчики, либо применять редукторы. Вот так выглядит L293D:
Вот то, что получилось у меня, мой вариант ездит за рукой: В обще драйвер двигателя это штука универсальная, на ней можно собрать не только робота! Эта микросхема усиливает сигнал низкого уровня и благодаря этому она может управлять и лампочками, и другими прибамбасами, и даже на ней можно сделать четыре сенсорные "кнопки" (кому интересно могу написать статью)!
а по этой схеме можно собрать танцующего робота?Жутко закралась идея переделать танцующую корову.движения у нее примитивные(маятник головы),но уж очень она прикольная.подруга офигеет от такой модернизации))).в место светодиодов нужно добавить микрофонный усилитель?2х двигателей должно хватить,но можно было бы и третий... и разделить их по частотам.было бы просто "улет"!)видел светомайки с мигаюшими огнями в такт музыке.принцип ведь то же!?